英国科学家利用微型雷达跟踪 小蜜蜂
英国科学家赖利等人研发了一种能粘在蜜蜂背上的微型雷达跟踪系统,并用它追踪了蜜蜂的整个采蜜过程。他们发现蜜蜂确实能够读懂舞蹈中所包含的编码信息,而且在飞向目标的过程中也不会受风向变化的影响。该发现刊登在最新一期的《自然》杂志上,打消了科学界长久以来关于蜜蜂舞蹈语言的争议。
蜜蜂是人类最喜爱的昆虫之一,人们常常为它的勤劳感叹不已。奥地利生物学家弗里施自1915年开始与其学生和同事对蜜蜂进行了50多年的试验研究,认为蜜蜂之所以能够有条不紊、迅速而敏捷地采到花蜜是因为它可通过舞蹈语言相互交流。蜜蜂可以用舞蹈方式指示它的同伴食源的质量、距离和方位。这个研究还让弗里施在1973年获得了诺贝尔奖。
蜜蜂真的用圆圈舞蹈或“8字舞”来指示蜜源?
弗里施的研究指出,大批工蜂出巢采蜜前先派出“侦察蜂”去寻找蜜源。这些“侦察员”一旦发现了有利的采蜜地点或新的优质蜜源植物,它们就会变成采集蜂,并飞回蜂巢跳上一支圆圈舞蹈或“8”字形舞蹈来指出食物的所在地,并以舞蹈的速度表示蜂巢到蜜源之间的距离,还以附在身上的花粉的味道告知食物的种类,通知大家一块儿去采蜜。侦察蜂找到距蜂箱100米以内的蜜源时,即回巢报信,除留有追踪信息外,还在蜂巢上交替性地向左或向右转着小圆圈,以“圆舞”的方式爬行。
如果蜜源在距蜂箱百米以外,侦察蜂便改变舞姿,呈“∞”字,所以也叫“8字舞”或“摆尾舞”。如果将全部爬行路线相连,直线爬行的时间越长,表示距离蜜源越远。直线爬行持续1秒钟,表示距离蜜源约500米;持续2秒,则约l000米。
蜜源与蜂巢的距离和舞蹈动作的快慢有直接关系。距离越近,舞蹈过程中转弯越急、爬行越快;距离越远,转弯越缓,动作也慢。蜜蜂的舞蹈动作,不仅能报告花蜜距巢远近,还能指示花蜜所在的方向。如果跳摇摆舞时,蜜蜂头朝上,则是说:“朝太阳的方向飞去,能找到花粉。”反之,则是报告:“在背向太阳的地方可以找到食物。”
蜜蜂只是凭借跳舞蜜蜂身上的气味慢慢搜寻食物来源?
尽管大多数生物学家倾向于弗里施关于舞蹈是真正信息来源的观点,但关于这种“编码”是怎样被翻译成一种“飞行计划”的却一直没有定量描述。对这种假设持怀疑态度者提出,旁观的蜜蜂只是从跳舞的蜜蜂身上获得食物气味,然后凭借气味搜寻食物来源。生物学家艾德里安·文纳认为,蜜蜂跳舞只是在进化过程中产生的一种习惯,其实并没有传递任何信息。从蜜蜂表演舞蹈到旁观的蜜蜂抵达食物源有一个很明显的时间差,这说明其它蜜蜂只是从跳舞的蜜蜂身上获得食物气味,然后凭借气味慢慢搜寻食物来源。
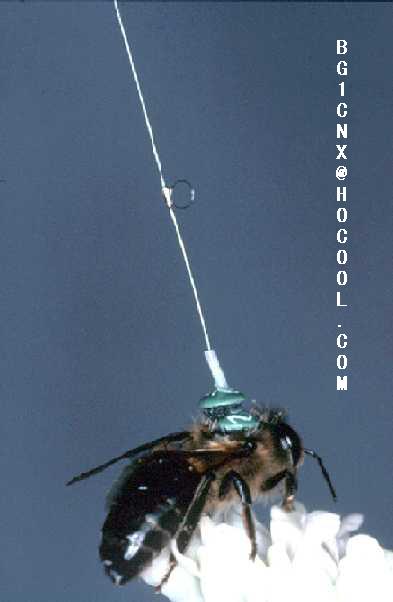
微型雷达收发器被粘在蜜蜂背上来追踪其飞行路径。
 为了探究蜜蜂舞蹈语言的奥秘,英国罗特哈默·斯特德农业研究中心的一个研究小组,利用雷达来追寻蜜蜂搜寻蜜源的飞行路径。他们设计了一种只有16毫米大小的微型异频雷达收发器,并把这些收发器安装在了作为研究对象的蜜蜂身上。研究小组负责人乔·赖利表示,他们耗费了将近两年时间来研制出这个微型雷达收发机。它必须足够小、足够轻,以至于一个蜜蜂能够载着它轻松飞行而不影响正常的采集工作。与此同时,雷达收发机还要得到足够的能量以进行全方位的信号收发。
为了探究蜜蜂舞蹈语言的奥秘,英国罗特哈默·斯特德农业研究中心的一个研究小组,利用雷达来追寻蜜蜂搜寻蜜源的飞行路径。他们设计了一种只有16毫米大小的微型异频雷达收发器,并把这些收发器安装在了作为研究对象的蜜蜂身上。研究小组负责人乔·赖利表示,他们耗费了将近两年时间来研制出这个微型雷达收发机。它必须足够小、足够轻,以至于一个蜜蜂能够载着它轻松飞行而不影响正常的采集工作。与此同时,雷达收发机还要得到足够的能量以进行全方位的信号收发。
据介绍,最终版本的微型雷达收发机仅有10至12毫克,比蜜蜂所要采集的花粉还轻得多,携带它的蜜蜂在采蜜时能够灵活自如地飞行。这个雷达由一根特殊钢丝制成的非线性天线和一个微小芯片组成,看起来像一根长胡须。研究者用特制的胶水将微型异频雷达收发机粘在600多只蜜蜂背上,然后将它们放入1万多只蜜蜂的蜂群中,跟踪它们的活动情况。每个收发机传回的信号都是独特的,可以与其他收发机的信号进行区别。一旦蜜蜂背上了雷达,它们被追踪的过程就如老式电影里所描绘的那样:某个闪光点在荧屏上不停地闪烁,然后信号被记录下来,并转换成图表。因为微型雷达收发机太小,缺乏足够的电池来供电,所以设计者们让雷达发射20千瓦的电讯号给收发机提供能量。
研究发现蜜蜂能够依据舞蹈找到蜜源,但是有一定误差。
赖利的团队自1996年起就开始用微型雷达来追踪蜜蜂的踪迹,大量的实验数据证明蜜蜂能够读懂舞蹈编码中所包含的信息。小组负责人乔·赖利指出,研究人员用科学的方法证明了弗里施关于蜜蜂舞蹈语言的假设,以定量的方法一劳永逸地解决了这个问题。蜜蜂可以用特定的运动方式将有关食物源的位置、距离及丰富程度通知蜂房里的同伴。侦察蜂出去寻找蜜源,然后回来报告给蜂群,其它的蜜蜂就跟着过去,如果蜂群比较大了,要分群的时候,也派工蜂出去寻找新的巢穴,新的巢穴的距离、方位,新的巢穴的质量,也是通过工蜂形体的动作(方向、次数、力度)来传递的。
对于蜜蜂在觅食过程中存在的时间差问题,赖利解释道,这个矛盾是弗里施造成的。弗里施认为蜜蜂读取了侦察蜂的舞蹈信息后径直飞向蜜源。但实际上蜜蜂在这个过程中花了10分钟而不是1分钟。实验显示,蜜蜂确实能够迅速解读舞蹈提供的信息,然后快速飞抵所指示的地点,而且在它们飞向目标的过程中也不会受风向变化的影响。但是它们飞抵的目的地很少是完全正确的,通常离蜜源都有5到6米的误差。一旦蜜蜂结束了依指示前行的飞行后会改变飞行模式,它们会进行环绕飞行来寻找精确的蜜源。来来回回的环绕飞行一般要耗上10多分钟,正是时差之所在。
携带微型雷达收发机的另一个作用是可以准确探测生物武器所在位置。
为了确定蜜蜂并不是依据气味来寻找食物来源,研究小组还进行了另一个实验。他们先让一些蜜蜂观看了8字舞蹈,然后迅速将它们转移至250米以外的地方再进行放飞。研究者发现,这些蜜蜂还是依据此前观看8字舞蹈所传递的信息进行飞行,它们所抵达的地点正好与真正蜜源位移了大约250米。
康奈尔大学的生物学教授托马斯·西利表示:“这是一个非常成功的实验,他们进行了非常精确的操控以至于得到非常明晰结果。但是这里仍存在一些问题,我们不知道当天色阴暗时,旁观的蜜蜂看了8字舞后能否接收到所有信息,而且我们仍不知道这一过程是怎样进化而来的。”美国蒙大拿大学的昆虫学家杰里布罗门申克则认为,这项研究具有广泛应用价值,例如,蜜蜂具有异常灵敏的嗅觉能够记住大量不同的气味,携带微型雷达收发机之后,它可以准确探测出生物武器所在位置。
蜜蜂是人类最喜爱的昆虫之一,人们常常为它的勤劳感叹不已。奥地利生物学家弗里施自1915年开始与其学生和同事对蜜蜂进行了50多年的试验研究,认为蜜蜂之所以能够有条不紊、迅速而敏捷地采到花蜜是因为它可通过舞蹈语言相互交流。蜜蜂可以用舞蹈方式指示它的同伴食源的质量、距离和方位。这个研究还让弗里施在1973年获得了诺贝尔奖。
蜜蜂真的用圆圈舞蹈或“8字舞”来指示蜜源?
弗里施的研究指出,大批工蜂出巢采蜜前先派出“侦察蜂”去寻找蜜源。这些“侦察员”一旦发现了有利的采蜜地点或新的优质蜜源植物,它们就会变成采集蜂,并飞回蜂巢跳上一支圆圈舞蹈或“8”字形舞蹈来指出食物的所在地,并以舞蹈的速度表示蜂巢到蜜源之间的距离,还以附在身上的花粉的味道告知食物的种类,通知大家一块儿去采蜜。侦察蜂找到距蜂箱100米以内的蜜源时,即回巢报信,除留有追踪信息外,还在蜂巢上交替性地向左或向右转着小圆圈,以“圆舞”的方式爬行。
如果蜜源在距蜂箱百米以外,侦察蜂便改变舞姿,呈“∞”字,所以也叫“8字舞”或“摆尾舞”。如果将全部爬行路线相连,直线爬行的时间越长,表示距离蜜源越远。直线爬行持续1秒钟,表示距离蜜源约500米;持续2秒,则约l000米。
蜜源与蜂巢的距离和舞蹈动作的快慢有直接关系。距离越近,舞蹈过程中转弯越急、爬行越快;距离越远,转弯越缓,动作也慢。蜜蜂的舞蹈动作,不仅能报告花蜜距巢远近,还能指示花蜜所在的方向。如果跳摇摆舞时,蜜蜂头朝上,则是说:“朝太阳的方向飞去,能找到花粉。”反之,则是报告:“在背向太阳的地方可以找到食物。”
蜜蜂只是凭借跳舞蜜蜂身上的气味慢慢搜寻食物来源?
尽管大多数生物学家倾向于弗里施关于舞蹈是真正信息来源的观点,但关于这种“编码”是怎样被翻译成一种“飞行计划”的却一直没有定量描述。对这种假设持怀疑态度者提出,旁观的蜜蜂只是从跳舞的蜜蜂身上获得食物气味,然后凭借气味搜寻食物来源。生物学家艾德里安·文纳认为,蜜蜂跳舞只是在进化过程中产生的一种习惯,其实并没有传递任何信息。从蜜蜂表演舞蹈到旁观的蜜蜂抵达食物源有一个很明显的时间差,这说明其它蜜蜂只是从跳舞的蜜蜂身上获得食物气味,然后凭借气味慢慢搜寻食物来源。
微型雷达收发器被粘在蜜蜂背上来追踪其飞行路径。
为了探究蜜蜂舞蹈语言的奥秘,英国罗特哈默·斯特德农业研究中心的一个研究小组,利用雷达来追寻蜜蜂搜寻蜜源的飞行路径。他们设计了一种只有16毫米大小的微型异频雷达收发器,并把这些收发器安装在了作为研究对象的蜜蜂身上。研究小组负责人乔·赖利表示,他们耗费了将近两年时间来研制出这个微型雷达收发机。它必须足够小、足够轻,以至于一个蜜蜂能够载着它轻松飞行而不影响正常的采集工作。与此同时,雷达收发机还要得到足够的能量以进行全方位的信号收发。 据介绍,最终版本的微型雷达收发机仅有10至12毫克,比蜜蜂所要采集的花粉还轻得多,携带它的蜜蜂在采蜜时能够灵活自如地飞行。这个雷达由一根特殊钢丝制成的非线性天线和一个微小芯片组成,看起来像一根长胡须。研究者用特制的胶水将微型异频雷达收发机粘在600多只蜜蜂背上,然后将它们放入1万多只蜜蜂的蜂群中,跟踪它们的活动情况。每个收发机传回的信号都是独特的,可以与其他收发机的信号进行区别。一旦蜜蜂背上了雷达,它们被追踪的过程就如老式电影里所描绘的那样:某个闪光点在荧屏上不停地闪烁,然后信号被记录下来,并转换成图表。因为微型雷达收发机太小,缺乏足够的电池来供电,所以设计者们让雷达发射20千瓦的电讯号给收发机提供能量。
研究发现蜜蜂能够依据舞蹈找到蜜源,但是有一定误差。
赖利的团队自1996年起就开始用微型雷达来追踪蜜蜂的踪迹,大量的实验数据证明蜜蜂能够读懂舞蹈编码中所包含的信息。小组负责人乔·赖利指出,研究人员用科学的方法证明了弗里施关于蜜蜂舞蹈语言的假设,以定量的方法一劳永逸地解决了这个问题。蜜蜂可以用特定的运动方式将有关食物源的位置、距离及丰富程度通知蜂房里的同伴。侦察蜂出去寻找蜜源,然后回来报告给蜂群,其它的蜜蜂就跟着过去,如果蜂群比较大了,要分群的时候,也派工蜂出去寻找新的巢穴,新的巢穴的距离、方位,新的巢穴的质量,也是通过工蜂形体的动作(方向、次数、力度)来传递的。
对于蜜蜂在觅食过程中存在的时间差问题,赖利解释道,这个矛盾是弗里施造成的。弗里施认为蜜蜂读取了侦察蜂的舞蹈信息后径直飞向蜜源。但实际上蜜蜂在这个过程中花了10分钟而不是1分钟。实验显示,蜜蜂确实能够迅速解读舞蹈提供的信息,然后快速飞抵所指示的地点,而且在它们飞向目标的过程中也不会受风向变化的影响。但是它们飞抵的目的地很少是完全正确的,通常离蜜源都有5到6米的误差。一旦蜜蜂结束了依指示前行的飞行后会改变飞行模式,它们会进行环绕飞行来寻找精确的蜜源。来来回回的环绕飞行一般要耗上10多分钟,正是时差之所在。
携带微型雷达收发机的另一个作用是可以准确探测生物武器所在位置。
为了确定蜜蜂并不是依据气味来寻找食物来源,研究小组还进行了另一个实验。他们先让一些蜜蜂观看了8字舞蹈,然后迅速将它们转移至250米以外的地方再进行放飞。研究者发现,这些蜜蜂还是依据此前观看8字舞蹈所传递的信息进行飞行,它们所抵达的地点正好与真正蜜源位移了大约250米。
康奈尔大学的生物学教授托马斯·西利表示:“这是一个非常成功的实验,他们进行了非常精确的操控以至于得到非常明晰结果。但是这里仍存在一些问题,我们不知道当天色阴暗时,旁观的蜜蜂看了8字舞后能否接收到所有信息,而且我们仍不知道这一过程是怎样进化而来的。”美国蒙大拿大学的昆虫学家杰里布罗门申克则认为,这项研究具有广泛应用价值,例如,蜜蜂具有异常灵敏的嗅觉能够记住大量不同的气味,携带微型雷达收发机之后,它可以准确探测出生物武器所在位置。